This illustrates a simplified all mechanical version of my free to caster reverse-trike. It has the ability to transition between free to caster and normal steer modes. I tried to make the mechanics as simple as possible and hopefully not require power assist to lean a human powered bike with rider.
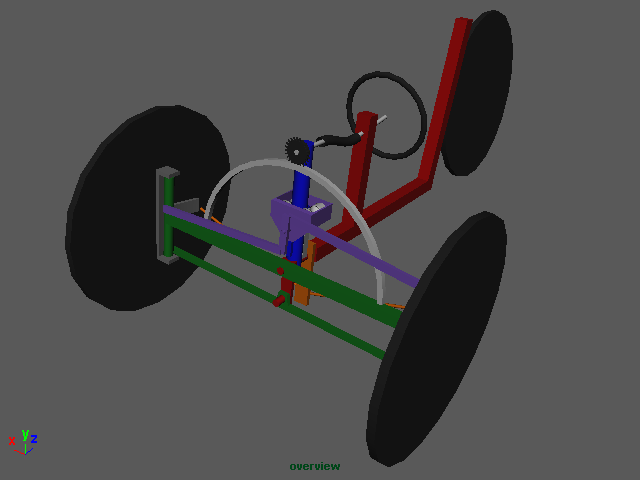
To describe how it works I’ll start off with the four bar parallelogram shown in green. The wheel spindles rotate around the uprights. The leaning body of the bike (shown in red), rotates on an axis at the center of the top horizontal bar. The leaning body also has an arm that connects to the lower bar that keeps the bike parallel with the uprights on the sides of the four bar parallelogram. Added to the top horizontal bar is a vertical bar (shown in blue) that I call the” actuator bar”. It rotates at its base on the same axis as the leaning body at the center of the top horizontal bar. On the top of the actuator bar there is a pinion gear that connects to the steering wheel with a flexible cable (like used on a Ford Pinto steering shaft). When the steering wheel is turned the pinion gear engages a curved rack that has its radius around the pivot point of the actuator bar. It is the actuator bar that drives both lean and steer.
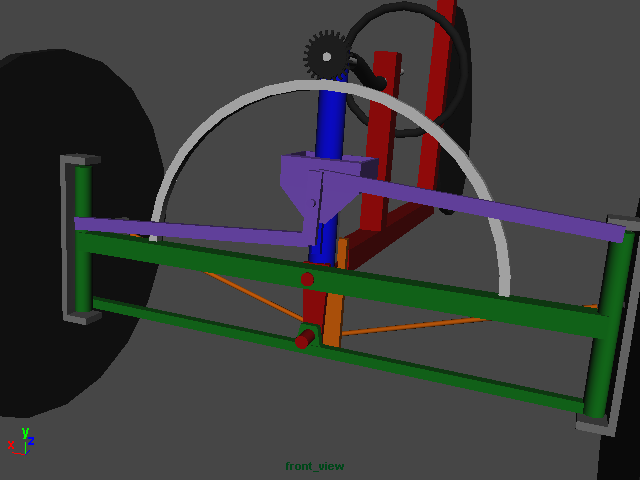
On the front side of the actuator is a Watt’s linkage (shown in purple) that connects the uprights of the four bar parallelogram to the actuator bar via a connector that can roll up and down on the actuator bar, I call this rolling connector the” transition device”.
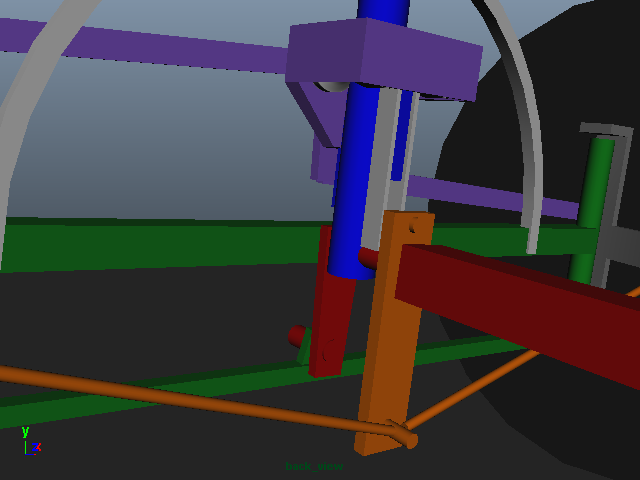
On the backside of the actuator bar there is a pair of leaf springs that are bolted at the top of the Springs to the actuator bar. The bottom of the two springs clamp a Pitman arm (shown in orange) that rotates freely around the same axis as the actuator bar. Steering rods connect the Pitman arm to the wheel spindles. In free to caster mode the Springs only lightly push the Pitman arm in the direction of steer, allowing the wheels through centrifugal force to caster to the proper angle of steer for the current speed and lean angle of the bike. Adding a damper to the Pitman arm may assist in the natural counter steer of free to caster.
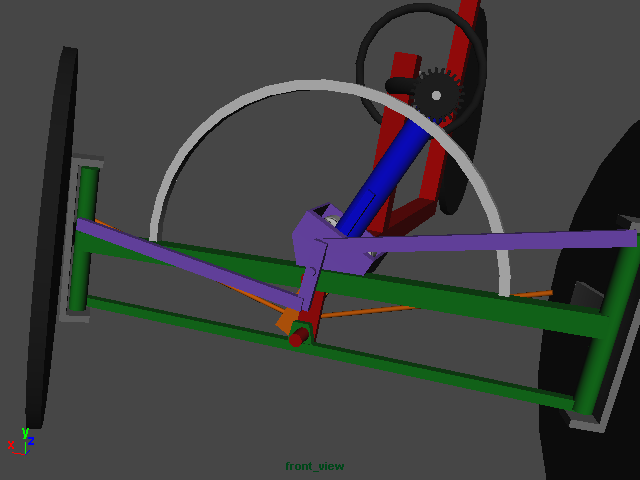
To transition from free to caster to normal steer the transition device moves down the actuator from its top position to the bottom. This causes two things to happen simultaneously. The Springs that connect the Pitman arm, progressively clamp the Pitman arm to the movement of the actuator bar by the rollers in the transition device as it lowers, and the pivot point of the Watt’s linkage goes to or close to the pivot point of the actuator bar. This results with the steering being firmly locked to the rotations of the steering wheel, and little or no lien of the bike, because there is less lateral movement of the Watt’s linkage the closer it is to the axis of the actuator bar.
Having the pinion gear at the top of the blue bar gives the most leverage to allow for (hopefully) no power steering requirements. In addition I plan to add springs that pull the parallelogram square, this should cause a self righting effect and hopefully balance out effort between leaning into and away from gravity. For the bicycle, the transition between normal steer and free to caster will be manual because the bike is really intended as a proof of theory for the motorcycle I plan to build, but it could use a hand lever with cables and pulleys to raise and lower the transition device.
The motorcycle version will use a small winch motor or hydraulics to raise and lower the transition device. Power steering will also be used to assist leaning effort.
Ok, the above execution of my concept has been modified. I have a much simpler version now. Unfortunately I have so little time to work on it, that I have not had time to make any drawings, as I would rather spend the 6 hours a month I get to work on it in the garage. The new system uses a chebyshev linkage between the control arm and the upright of the 4 bar instead of a Watt’s linkage. Instead of the flex-drive it uses a telescoping shaft with universal joints and instead of the curved rack it uses a chain and sprockets to rotate the actuator arm around a sprocket hard fastened to the non tilting bottom bar of the 4 bar. Two leaf springs mounted on the control arm clamp a Pitman Arm connected to the steering of the wheels. The springs allow the wheels to free caster, but also put pressure on them to turn in the desired direction. As the chebyshev linkage connected to the control arm moves from the top of the control arm to the bottom, two things happen. The angle of the uprights compared to the control arm reduces pulling them from any lean to an upright position. At the same time rollers on the leaf springs clamp them tighter to the Pitman arm until the Pitman arm is forced to move 100% with the control arm. The end result is a self righting transition from tilting free to caster to non-tilting normal steer, and of course back again. The transition would take place between the speeds of 5 to 10 mph.