How do you make an enclosed leaning reverse trike lean?
That my friends is the million dollar question that I need to find the answer to.
Only a few people have built a leaning reverse trike and used a multitude of technologies to control steering and leaning, some with better results than others. Below I list a few of these technologies with their major pros and cons. In future posts I’ll get into more detail on what I consider to be the better technologies for leaning and steering a leaning reverse trike in greater detail. But first I should give a little technical discussion on the mechanics of how a motorcycle leans and turns.
The following equation can be used to determine the optimum angle of lean based on the current speed of the leaning reverse trike and radius of the turn it is making. The radius of a turn can be determined by the angle the wheels are turned and the length of the wheelbase. That is in a perfect world where wheels maintain traction with the road at all times. This will not work if you are corrective steering for a rear end slide out, in fact using this equation to set a lean angle with servos or direct linkage, would pitch the leaning reverse trike into a high side leaning the motorcycle to the outside of the turn.
radius of turn = *wheelbase / sine( turning angle of wheel )
gravity constant = 386.088 (in inches per second)
speed = (*wheel diameter x 3.14159) x revolutions per second
Angle of lean = tangent( (speed x speed) / (radius of turn x gravity constant) )
* measurements in inches
How a motorcycle leans and turns using gyroscopic effect
I am not going to get into the mathematics of gyroscopic effects. For one it’s over my head and if I ever do tackle that job it will need its own post. So, what I will try to do is give the basics of gyroscopic effects in plain English as to how it pertains to all single-track vehicles, like a bike or motorcycle. All moving objects have inertia, meaning they want to continue the existing motion in a straight line. A wheel spinning around a center axis is doing just that, but because the motion of the wheel is constrained by the central axis the wheel continues to rotate. If a force is applied to the wheel to change the rotation of the wheel on any one of its two other axis, the inertia will cause a reaction on the other remaining axis to try and maintain its original path of motion. If you steer the wheel to the left it will cause the wheel to lean to the right. If you lean the wheel to the left it will steer to the the left. To make a left hand turn on a motorcycle, you first counter steer to the right by pushing the left handlebar forward. This does two things. It steers your front wheel to the right causing the gyroscopic effect to lean the motorcycle to the left. Now that the motorcycle is leaning to the left the gyroscopic effect causes the front wheel to turn (caster) to the left to the correct angle of turn for the amount the motorcycle is leaning and its speed.
If you are building a leaning reverse trike where the wheels don’t lean (a multi-track vehicle), you will not need to recon with these forces, but you will need some way to lean your vehicle that can fight the centrifugal forces as you make a turn.
If you want a reverse trike where the wheels lean, you are building what is called a virtual single-track vehicle. This type of vehicle does have to deal with the powerful gyroscopic forces. You can get them to work for you like on a motorcycle, or you will have to fight them. A true virtual single-track vehicle would handle just like a motorcycle and use counter steering to control turning and lean. You will need the same skill level to drive it as a motorcycle and if it is enclosed you will need a way to lock the tilt for low speeds and while stopped. The other option for a leaning reverse trike is a Free To Caster (FTC) vehicle. A Free to Caster trike skips the counter steering and uses power assisted controls to lean the trike and its wheels. There is no steering linkage to the wheels, they are allowed to find through gyroscopic effect to find the proper angle of turn for the amount they are leaned. Because the rider always has control over the amount of lean there is a much less chance of low-siding or high-siding a leaning reverse trike.
Purely mechanical straight linkage
A purely mechanical straight linkage is where the angle of the steering wheel is directly linked to the leaning of the trike, so that when you steer, the amount of lean is directly related to the angle of the front wheels, or in some instances the steering is directly related to the angle of lien. This is the simplest to implement and as long as your speeds are very low (less than 20 mph) it will work. The problem is, that the angle of the lien is in direct proportion to the speed and the radius of the curve it is traveling in. In other words the faster you go around a curve the more the bike has to lean. A purely mechanical straight linkage does not take this into account and you’ll most likely be leaning too much for a slow turn or not enough for a fast one. One way around this would be to use a constant variable transmission or Reeves Drive to adjust the ratio between steering and leaning based on the speed of the leaning reverse trike. This would require a speed sensor and computer controlled servo to set the ratio of the reeves drive. As mentioned above if you are corrective steering for a rear end slide out, a mechanical linkage between steering and leaning would lean the trike to the outside of the turn, increasing the possibility of a rollover.
Using electronic sensors, computers and servo motors
Instead of using a continuous variable transmission as above you could use sensors to determine speed and steering wheel degree of turn to calculate the proper angle of lean and use a servo to lean the motorcycle. This setup still has the problem of the computer thinking you are making a right turn when you are correcting for a rear end slide-out while turning left and causing the reverse trike to lean to the outside of the turn increasing the possibility of a rollover. Using Gyros and accelerometers to calculate lean angle based on longitudinal and lateral acceleration (how fast the vehicle is traveling sideways) seems to me to be a better solution, but it does have its draw backs too. An accelerometer can read the lateral force (how many Gs are pulling on the trike sideways) exerted on the reverse trike as it goes around a corner, and based on that force a small computer can control a servo to lean the trike to the proper angle. This solves the problem of corrective steering in a slide causing a lean in the wrong direction. The problem with this is that the lean of the leaning reverse trike will always lag slightly behind the turn of the wheels and as the physics of gyroscopic motion mentioned above turning a wheel will cause it to want to lean to the outside of the turn, so the servo controlling the lean of the reverse trike will have to fight the gyroscopic effect of the wheels and the lateral forces on the trike. This adds up to requiring a heavy duty servo and the electrical and or hydraulic system to power it. I also wonder about the ride sensation and stability caused by this delay in lean. If using wheel rotation to calculate speed an ABS brake system must be used so panic stop with the wheels locked up will not be read as standing still. Adding a longitudinal accelerometer reading to the wheel rotation would be a good idea to test against false speed readings.
Free to Caster
Look Ma no hands! Would be a good subtitle for this method of steering a leaning reverse trike. Free to Caster steers by leaning the wheels and trike and allowing the gyroscopic effect to turn the wheels. There is no steering linkage. This resolves most of the issues mentioned above with corrective steering in a slide and it has physics working for you instead of fighting you. Besides the unsettling idea of not having direct control over where your wheels are pointing there is one big problem with a free to caster leaning reverse trike. Gyroscopic effect diminishes and stops all together at slow speeds. Without gyroscopic effect you will not be able to steer; so, a hybrid system of direct linkage will need to be used to control the vehicle at slow speeds or while reversing that can transition smoothly to Free to Caster once gyroscopic effect speeds have been reached. This transition should be invisible to the operator and needs to be able to happen even in a turn while accelerating or breaking. One of my big questions about Free to Caster is — What happens in a panic stop when the wheels are locked up by breaks? Panic situations are when you need the most control. If in a locked wheel panic stop the transition from Free to Caster to direct steering linkage will have to be automatic, fast, and not confuse the operator or put him in peril by a sudden change in the way the leaning reverse trike maneuvers or handles.
After talking with Tom Blackburn, who is one of the few to actually build a free to caster leaning reverse trike. I have apparently been over thinking the transition to and from free caster, according to Tom even at very low speeds he is in free caster mode. Only when stopped or reversing is the steering angle of the wheels hydraulically locked to the lean of the motorcycle. Otherwise opening an adjustable needle valve allows the wheels to find its own steering angle based on the lean, while being nudged in the right direction by the hydraulics. He also said that in a panic stop when all wheels are locked up the trike will continue to go straight because of the downward pressure on the front wheel trail. I am coming to the happy conclusion that this is the way to go.
The one negative I have to Tom’s set up is that the lean of the trike is directly linked to the steering wheel, so that the trike leans even when stopped or reversing, which sounds like it would feel very awkward feeling while parallel parking. I would like to have a system where the lean is hydraulically connected to the steering wheel, so that when not in free caster mode and the steering wheel is turned the motorcycle can only be leaned in a direction toward vertical, while the wheels steering angle are locked hydraulically to the steering wheel rotation.
Free To Caster (FTC) transition to Non Lean Normal Steer (NLNS)
Click image for a larger one.
The following is a concept. It has not been tested and is only put forth as a suggestion to try.
Problem: how to transition a reverse trike from FTC to NLNS simply, smoothly, safely, and without making the driver feel the difference.
The following equation can determine the proper lean angle and steering angle for a single track vehicle based on the wheelbase length, speed, and radius of the curve being driven.
Angle of lean = tangent( (speed x speed) / (radius of turn x gravity constant) )
Below are some example values done to make the sharpest turn at the given speed with a maximum steering angle of 30 degrees and maximum lean angle of 45 degrees with a 90 inch wheelbase.
| MPH |
Lean |
Steering |
Lean:Steer – Ratios |
| 0 |
0 |
30 |
0.000:1.000 |
| 2.5 |
.02 |
30 |
0.006:1.000 |
| 5 |
6.65 |
30 |
0.148:1.000 |
| 7.5 |
14.69 |
30 |
0.326:1.000 |
| 10 |
36.06 |
30 |
0.555:1.000 |
| 12.5 |
45 |
30 |
0.801:1.000 |
| 14.6 |
45 |
30 |
1.000:1.000 |
| 17.5 |
45 |
21.02 |
1.000:0.700 |
| 20 |
45 |
16.09 |
1.000:0.536 |
| 40 |
45 |
4.023 |
1.000:0.143 |
| 80 |
45 |
1.006 |
1.000:0.033 |
Considering the above chart at 14.6 miles per hour, steering and lean, are at a 1 to 1 ratio. This seems like the time to start or end the transition with the other start end point at 0. From that speed and up the trike is full FTC. My original idea was to at this speed, lock the steering directly to the steering wheel with a clutch and as speed decreases reduce the amount of lean to steering wheel rotation until at 0 MPH it will not lean at all, just as it does naturally as the numbers above show. The sudden clamping of the steering angle at a given moment with the clutch is obviously not a good idea and after some hints from Philip James, I now realize the steering must be allowed to adjust progressively less as the speed decreases from 14.6 mph. This can be done by putting a progressive spring in between the steering wheel and the steering rods, so that at FTC speed the spring is very soft offering little to no resistance letting the wheels be free to caster, at slow or stopped the spring is extremely stiff allowing no deviation from steering wheel input. FTC should be the failsafe mode. The transition should happen at a maximum speed to allow it to keep up with maximum acceleration from 0 to 15 mph. It don’t believe it would be harmful if the transition were a bit slower than a full panic stop this might even be preferred. This will require some form of powered actuator to perform the transition and a controller to set the actuator at the proper level at a given speed. Possible means of power are an electric servo controlled by speed sensors, hydraulic actuator powered by a pump driven by the drive chain whose power at 14.6 mph is just strong enough to make the transition to FTC, and possibly although I doubt it would have the strength, but a centrifugal governor driven by the drive chain that would be the actuator or at least control it.
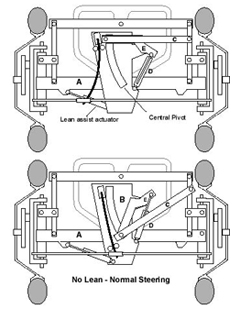
The leaning ratio can be done progressively through the transition by moving one end of a rod in a slot on an arm rotated by the steering wheel that is connected to and pivots on a vertical bar of a four bar parallelogram. Moving the end of the bar in the slot closer or further away from the arms rotation axis changes the distance the bar can push or pull the four bar out of parallel, or how much the vehicle will lean. The actuator that controls the movement of this arm also controls what portion of a leaf spring can flex. The longer the flex length, the softer the spring. The spring is mounted on the same arm rotated by the steering wheel that controls the lean, and the spring connects to the steering rods. The leaf spring mounted on bar B connects to the steering rods. Bar B always has full range of rotation. It is the amount of flex allowed by rollers moved by bar C on the spring that makes the transition from the wheels being able to free caster to being locked to the rotation of bar B.
I have come to the conclusion that the leaf spring concept as described above is not the best solution. Instead as bar C is rotated down by bar E, a cam rotates causing a set of springs to progressively clamp the movement of the steering rods to the rotation of bar B. In Full FTC mode there would be no resistance for the wheels to free caster. With the leaf spring I believe there would be to much pressure to return the wheel to center. I have also updated the images to reflect a new placement of the actuator and the addition of bar E for rotating Bar C. The original drawing caused a triangulation which made leaning impossible.
To get feedback from the tilting beams and front wheels back to the driver, the steering wheel is directly connected to bar B through a double universal shaft that will stay with the leaning body and be attached to bar A. This means the driver is always connected directly to lean and/or steering. A standard hydraulic power steering setup gives the assist.